Note
Go to the end to download the full example code or to run this example in your browser via Binder
Mappings to & from tangent space
This example shows how to use the UQpy Grassmann class to use the logarithmic map and the exponential map
Import the necessary libraries. Here we import standard libraries such as numpy and matplotlib, but also need to import the Grassmann class from UQpy implemented in the DimensionReduction module.
import matplotlib.pyplot as plt
import numpy as np
from UQpy.dimension_reduction import GrassmannOperations
from UQpy.dimension_reduction.grassmann_manifold.projections.SVDProjection import SVDProjection
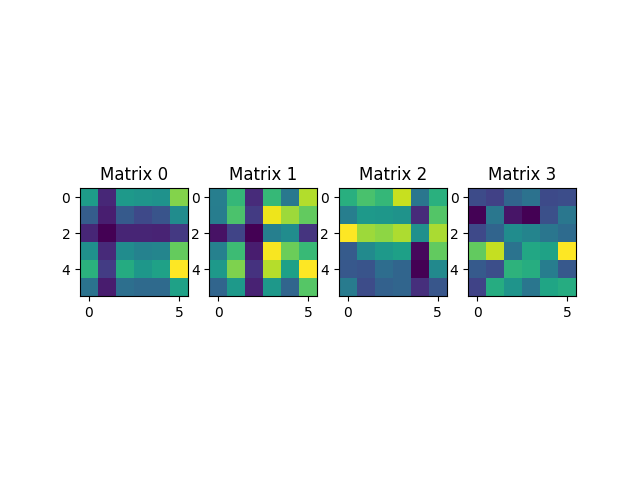
Generate four random matrices with reduced rank corresponding to the different samples. The samples are stored in matrices.
D1 = 6
r0 = 2 # rank sample 0
r1 = 3 # rank sample 1
r2 = 4 # rank sample 2
r3 = 3 # rank sample 2
np.random.seed(1111) # For reproducibility.
# Solutions: original space.
Sol0 = np.dot(np.random.rand(D1, r0), np.random.rand(r0, D1))
Sol1 = np.dot(np.random.rand(D1, r1), np.random.rand(r1, D1))
Sol2 = np.dot(np.random.rand(D1, r2), np.random.rand(r2, D1))
Sol3 = np.dot(np.random.rand(D1, r3), np.random.rand(r3, D1))
# Creating a list of matrices.
matrices = [Sol0, Sol1, Sol2, Sol3]
# Plot the matrices
fig, (ax1, ax2, ax3, ax4) = plt.subplots(1, 4)
ax1.title.set_text('Matrix 0')
ax1.imshow(Sol0)
ax2.title.set_text('Matrix 1')
ax2.imshow(Sol1)
ax3.title.set_text('Matrix 2')
ax3.imshow(Sol2)
ax4.title.set_text('Matrix 3')
ax4.imshow(Sol3)
plt.show()
Instantiate the UQpy class Grassmann.
manifold_projection = SVDProjection(matrices, p="max")
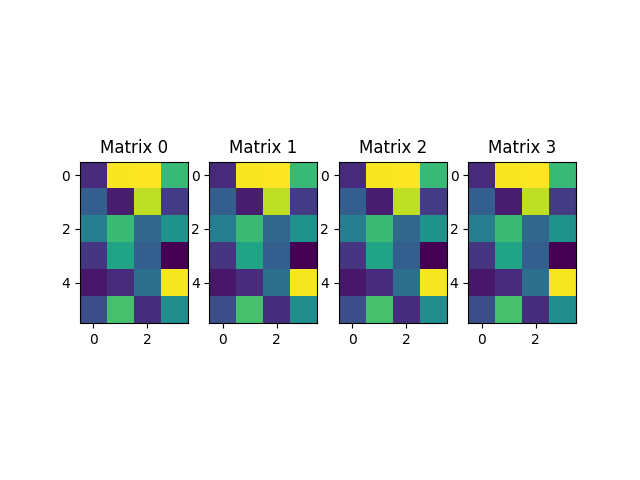
# Plot the points on the Grassmann manifold defined by the left singular eigenvectors.
fig, (ax1, ax2, ax3, ax4) = plt.subplots(1, 4)
ax1.title.set_text('Matrix 0')
ax1.imshow(manifold_projection.u[0].data)
ax2.title.set_text('Matrix 1')
ax2.imshow(manifold_projection.u[0].data)
ax3.title.set_text('Matrix 2')
ax3.imshow(manifold_projection.u[0].data)
ax4.title.set_text('Matrix 3')
ax4.imshow(manifold_projection.u[0].data)
plt.show()
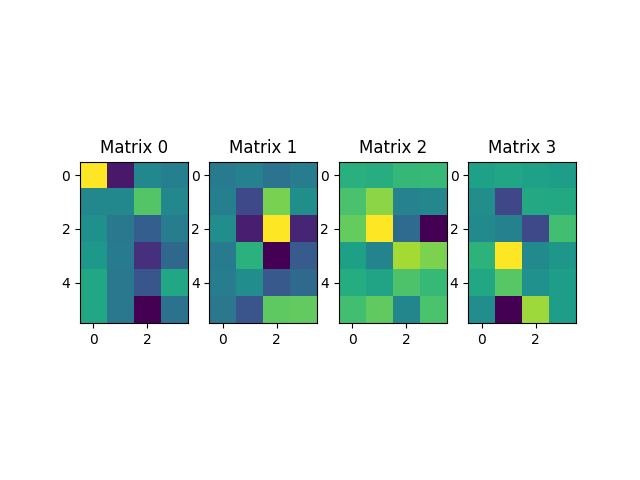
Project \(\Psi\), the left singular eigenvectors, on the tangent space centered at \(\Psi_0\).
points_tangent = GrassmannOperations.log_map(grassmann_points=manifold_projection.u,
reference_point=manifold_projection.u[0])
print(points_tangent[0])
print(points_tangent[1])
print(points_tangent[2])
print(points_tangent[3])
# Plot the matrices
fig, (ax1, ax2, ax3, ax4) = plt.subplots(1, 4)
ax1.title.set_text('Matrix 0')
ax1.imshow(points_tangent[0])
ax2.title.set_text('Matrix 1')
ax2.imshow(points_tangent[1])
ax3.title.set_text('Matrix 2')
ax3.imshow(points_tangent[2])
ax4.title.set_text('Matrix 3')
ax4.imshow(points_tangent[3])
plt.show()
[[ 4.44089210e-16 -3.33066907e-16 9.32529760e-32 -2.77555756e-17]
[-4.84362670e-32 1.61320124e-31 2.22044605e-16 -4.92812640e-32]
[ 2.77555756e-17 -5.55111512e-17 -1.38777878e-16 -3.81639165e-17]
[ 5.55111512e-17 -4.16333634e-17 -2.77555756e-16 -1.11022302e-16]
[ 1.11022302e-16 -5.55111512e-17 -1.66533454e-16 1.11022302e-16]
[ 1.11022302e-16 -5.55111512e-17 -3.88578059e-16 -7.63278329e-17]]
[[-0.00356937 0.03135083 -0.05771847 0.00237597]
[ 0.01741479 -0.28975468 0.54980075 0.11381392]
[ 0.10384695 -0.48607997 0.84398376 -0.45969562]
[-0.01109928 0.3171612 -0.61016186 -0.19399538]
[ 0.00188616 0.10302842 -0.20397277 -0.11089361]
[-0.03277415 -0.22870161 0.48278374 0.49537601]]
[[-0.01248918 -0.03404874 0.03382148 0.04441854]
[ 0.11463677 0.29686231 -0.32694232 -0.2932605 ]
[ 0.19610641 0.58343179 -0.47968446 -1.053919 ]
[-0.12507465 -0.31582661 0.3652045 0.26104234]
[-0.04035058 -0.09630879 0.12369612 0.0434478 ]
[ 0.08811558 0.18106297 -0.30092505 0.1188072 ]]
[[ 0.01078907 0.04320251 0.00795957 -0.00917463]
[-0.10961148 -0.5508007 0.06152557 0.06419726]
[-0.13646121 -0.1979701 -0.54413979 0.20639862]
[ 0.12503825 0.68035971 -0.13641218 -0.05973846]
[ 0.04410731 0.27443542 -0.09194715 -0.01214282]
[-0.11607213 -0.88728766 0.45206533 -0.01085307]]
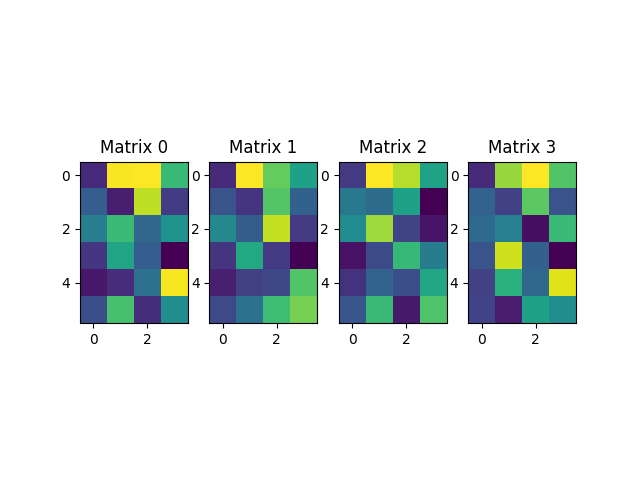
Map the points back to the Grassmann manifold.
points_grassmann = GrassmannOperations.exp_map(tangent_points=points_tangent,
reference_point=manifold_projection.u[0])
# Plot the matrices
fig, (ax1, ax2, ax3, ax4) = plt.subplots(1, 4)
ax1.title.set_text('Matrix 0')
ax1.imshow(points_grassmann[0].data)
ax2.title.set_text('Matrix 1')
ax2.imshow(points_grassmann[1].data)
ax3.title.set_text('Matrix 2')
ax3.imshow(points_grassmann[2].data)
ax4.title.set_text('Matrix 3')
ax4.imshow(points_grassmann[3].data)
plt.show()
Total running time of the script: ( 0 minutes 0.356 seconds)