Note
Go to the end to download the full example code or to run this example in your browser via Binder
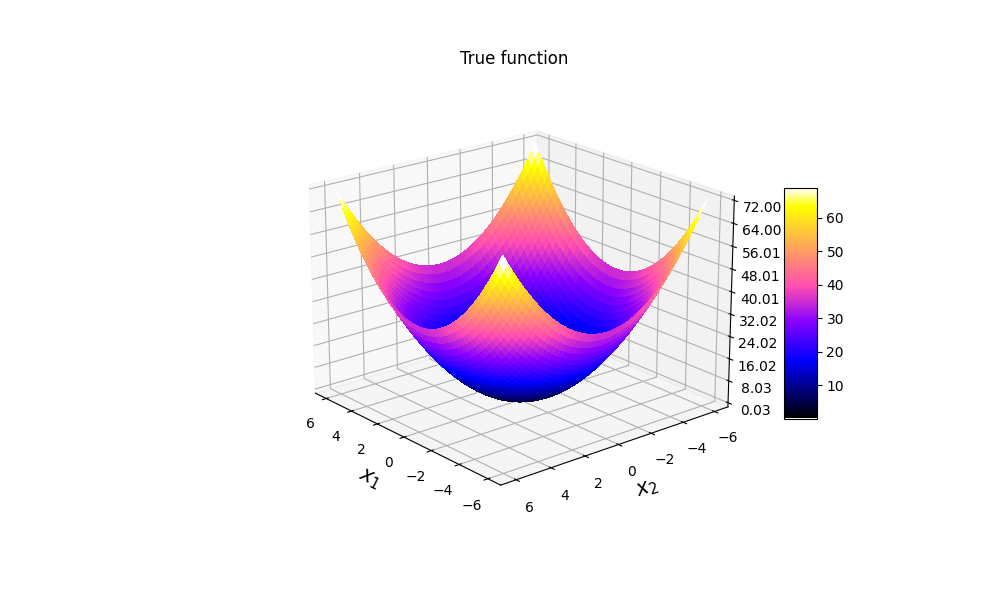
Sinusoidal Function Sphere function (2 random inputs, scalar output)
In this example, PCE is used to generate a surrogate model for a given set of 2D data.
Description: Dimensions: 2
Input Domain: This function is evaluated on the hypercube \(x_i \in [-5.12, 5.12]\) for all \(i = 1,2\).
Global minimum: \(f(x^*)=0,\) at \(x^* = (0,0)\).
Reference: Dixon, L. C. W., & Szego, G. P. (1978). The global optimization problem: an introduction. Towards global optimization, 2, 1-15.
Import necessary libraries.
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm
from matplotlib.ticker import LinearLocator, FormatStrFormatter
from UQpy.surrogates import *
from UQpy.distributions import Uniform, JointIndependent
Define the function.
Create a distribution object, generate samples and evaluate the function at the samples.
Visualize the 2D function.
xmin, xmax = -6,6
ymin, ymax = -6,6
X1 = np.linspace(xmin, xmax, 50)
X2 = np.linspace(ymin, ymax, 50)
X1_, X2_ = np.meshgrid(X1, X2) # grid of points
f = function(X1_, X2_)
fig = plt.figure(figsize=(10,6))
ax = fig.add_subplot(projection='3d')
surf = ax.plot_surface(X1_, X2_, f, rstride=1, cstride=1, cmap='gnuplot2', linewidth=0, antialiased=False)
ax.set_title('True function')
ax.set_xlabel('$x_1$', fontsize=15)
ax.set_ylabel('$x_2$', fontsize=15)
ax.zaxis.set_major_locator(LinearLocator(10))
ax.zaxis.set_major_formatter(FormatStrFormatter('%.02f'))
ax.view_init(20, 140)
fig.colorbar(surf, shrink=0.5, aspect=7)
plt.show()
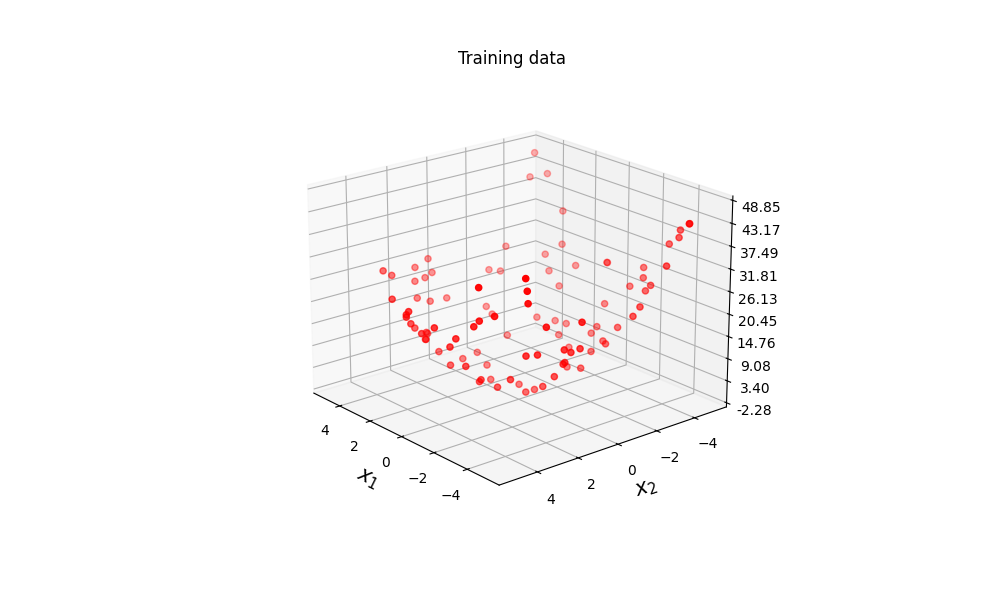
Visualize training data.
fig = plt.figure(figsize=(10,6))
ax = fig.add_subplot(projection='3d')
ax.scatter(x[:,0], x[:,1], y, s=20, c='r')
ax.set_title('Training data')
ax.zaxis.set_major_locator(LinearLocator(10))
ax.zaxis.set_major_formatter(FormatStrFormatter('%.02f'))
ax.view_init(20,140)
ax.set_xlabel('$x_1$', fontsize=15)
ax.set_ylabel('$x_2$', fontsize=15)
plt.show()
Create an object from the PCE class. Compute PCE coefficients using least squares regression.
max_degree = 3
polynomial_basis = TotalDegreeBasis(joint, max_degree)
least_squares = LeastSquareRegression()
pce = PolynomialChaosExpansion(polynomial_basis=polynomial_basis, regression_method=least_squares)
pce.fit(x,y)
Compute PCE coefficients using LASSO.
polynomial_basis = TotalDegreeBasis(joint, max_degree)
lasso = LassoRegression()
pce2 = PolynomialChaosExpansion(polynomial_basis=polynomial_basis, regression_method=lasso)
pce2.fit(x,y)
Compute PCE coefficients with Ridge regression.
polynomial_basis = TotalDegreeBasis(joint, max_degree)
ridge = RidgeRegression()
pce3 = PolynomialChaosExpansion(polynomial_basis=polynomial_basis, regression_method=ridge)
pce3.fit(x,y)
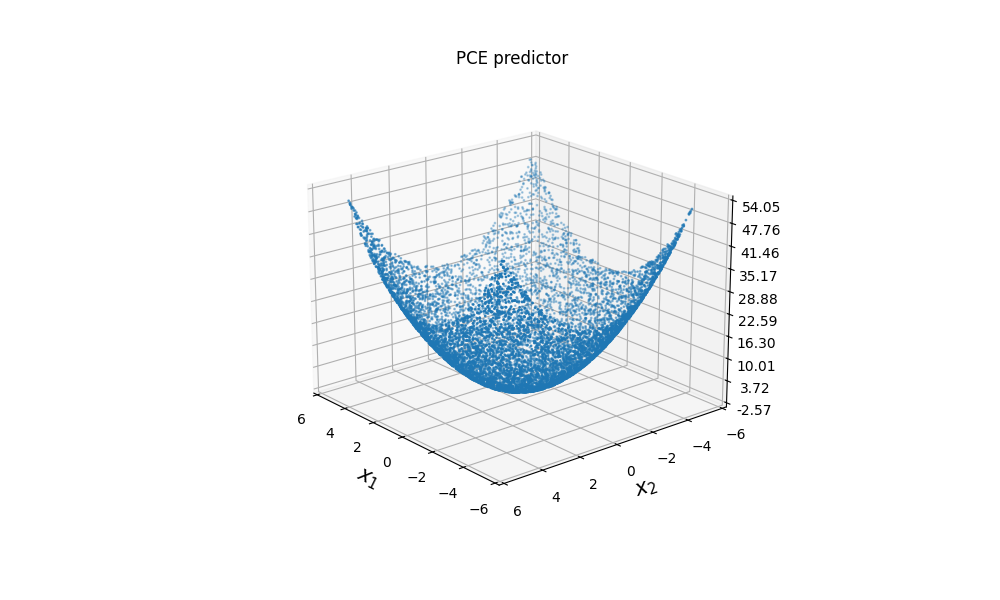
PCE surrogate is used to predict the behavior of the function at new samples.
n_test_samples = 10000
x_test = joint.rvs(n_test_samples)
y_test = pce.predict(x_test)
Plot PCE prediction.
fig = plt.figure(figsize=(10,6))
ax = fig.add_subplot(projection='3d')
ax.scatter(x_test[:,0], x_test[:,1], y_test, s=1)
ax.set_title('PCE predictor')
ax.zaxis.set_major_locator(LinearLocator(10))
ax.zaxis.set_major_formatter(FormatStrFormatter('%.02f'))
ax.view_init(20,140)
ax.set_xlim(-6,6)
ax.set_ylim(-6,6)
ax.set_xlabel('$x_1$', fontsize=15)
ax.set_ylabel('$x_2$', fontsize=15)
plt.show()
Error Estimation
Construct a validation dataset and get the validation error.
# validation sample
n_samples = 150
x_val = joint.rvs(n_samples)
y_val = function(x_val[:,0], x_val[:,1])
# PCE predictions
y_pce = pce.predict(x_val).flatten()
y_pce2 = pce2.predict(x_val).flatten()
y_pce3 = pce3.predict(x_val).flatten()
# mean relative validation errors
error = np.sum(np.abs((y_val - y_pce)/y_val))/n_samples
error2 = np.sum(np.abs((y_val - y_pce2)/y_val))/n_samples
error3 = np.sum(np.abs((y_val - y_pce3)/y_val))/n_samples
print('Mean rel. error, LSTSQ:', error)
print('Mean rel. error, LASSO:', error2)
print('Mean rel. error, Ridge:', error3)
Mean rel. error, LSTSQ: 3.418671019158622e-15
Mean rel. error, LASSO: 0.0010814080466504871
Mean rel. error, Ridge: 0.022999347585135183
Moment Estimation
Returns mean and variance of the PCE surrogate.
n_mc = 1000000
x_mc = joint.rvs(n_mc)
y_mc = function(x_mc[:,0], x_mc[:,1])
mean_mc = np.mean(y_mc)
var_mc = np.var(y_mc)
print('Moments from least squares regression :', pce.get_moments())
print('Moments from LASSO regression :', pce2.get_moments())
print('Moments from Ridge regression :', pce3.get_moments())
print('Moments from Monte Carlo integration: ', mean_mc, var_mc)
Moments from least squares regression : (17.47626666666666, 122.16795864177791)
Moments from LASSO regression : (17.475033992047372, 122.01572481219833)
Moments from Ridge regression : (17.44278392807492, 118.87517009983924)
Moments from Monte Carlo integration: 17.479457628244443 122.28294295715122
Total running time of the script: ( 0 minutes 0.454 seconds)